Quickstart Guide

e. Or use the Dashboard app instead of c. or d.

Do factory reset by turning the encoder to the left and choose kind of rotating- or linear actuator factory reset. enable with pressing encoder button. https://youtube.com/shorts/WnwSD0-63QY?feature=share If the encoder works wrong direction check next point.
wait until is rebootet, showing "push encoder for homing" in the display
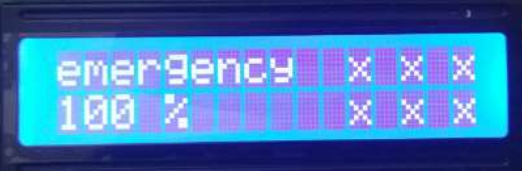
To access the Motion Operation screen, press the encoder. Observe the encoder's turning direction to see if the gain is increasing or decreasing. Also, test the functionality of the emergency button. In the bottom left corner, the gain will be displayed in percentages: turning right should increase the gain, while turning left should decrease it. Note that some encoders may operate in the opposite direction. This setting can be adjusted in the setup menu; please refer to the manual for further guidance
 8. Navigate through this menu until you find the menu named Encoder Direction. Here you can change direction for the encoder.
8. Navigate through this menu until you find the menu named Encoder Direction. Here you can change direction for the encoder.
 Check the "Emergency NC" option in the setup menu if the emergency button is not functioning.
Check the "Emergency NC" option in the setup menu if the emergency button is not functioning.  Some emergency buttons are only „normaly open“ or „normaly closed“ other have both , in the setup menu you can change the behaviour oft the emergency button. If all settings are made, use the menuentry „back“ to get to the upper menu-level.
if you are using the dashboard app you can edit the setting in the setup page tab
Some emergency buttons are only „normaly open“ or „normaly closed“ other have both , in the setup menu you can change the behaviour oft the emergency button. If all settings are made, use the menuentry „back“ to get to the upper menu-level.
if you are using the dashboard app you can edit the setting in the setup page tab after, you have to transmit the data to the controller
after, you have to transmit the data to the controller
Now set the number of installed actuators in the menu Actuators->Number Actuators(last entry) The assignment of the connections is only important if you want to use the check actuator function. Otherwise the connections can be connected as you like. If you want use the check actuators function. Make sure to connect the actuators in such a way that the connections of the actuators in ascending order from 1 are fully occupied without any gaps. For example 1,2,3,4 or 1,2 or 1,2,3,4,5 and so on. Now set all the actuator specific values. Rig -> to Rotary or Linear Custom etc. Encoder PPR, Electron.Gear , for rotating actuators: Gearbox Ratio 1:, Rot.Range, for linear actuators: Leadsrew Pitch, Actuator Length Lin. Act. Safety Check also in menu->Actuator->Actuators->Actuator1..8 submenu->Rotation: for cw or ccw rotation direction for each connected actuator. most values are preset usefull also here is possible to use the dashboard for easier setup
 If all settings are done turn encoder to the rigth until you have a menu
entry called „back“ , activate by pressing the encoder button. Repeat
this until you have the upper menu and the last entry by turning to the
rigth is „save and return“. Press encoder button to save the settings to
eeprom. You have to use this function everytime you change values.
If all settings are done turn encoder to the rigth until you have a menu
entry called „back“ , activate by pressing the encoder button. Repeat
this until you have the upper menu and the last entry by turning to the
rigth is „save and return“. Press encoder button to save the settings to
eeprom. You have to use this function everytime you change values.
Last updated